What’s Wrong?
The out-of-the-box Voltage Tiltback Thresholds, Battery Voltage Cutoffs, Current Limits, and Field Weakening values do not align with recommended settings. If left unchanged, they could compromise your safety or damage your battery.
Additionally, the XRV has an incorrect IMU setting that, if left as-is, can cause negative side effects and will change how the board rides and behaves.
Here’s what you need to fix, and why it matters:
NOTE: Once done, also make sure to follow the Start-Up Guide if you haven’t yet: GTV / XRV / PintV Power Kit Start Guide
1. Voltage Tiltback Thresholds
(Float Cfg/Refloat Cfg > Specs > [Voltage Tiltbacks])
These settings are responsible for alerting you when the battery voltage is too high (from regen) or too low (approaching a critical discharge level). Ignoring this can lead to nosedives and/or battery damage.
-
High Voltage Threshold: Set to 64.5V
(4.3V x Cell Count - Pint/X & XR have 15 cells)
Prevents damage from excessive regen. -
Low Voltage Threshold: Set to 45.0V
(3.0V x Cell Count - Pint/X & XR have 15 cells)
Alerts the rider to stop and charge before the battery gets critically low.
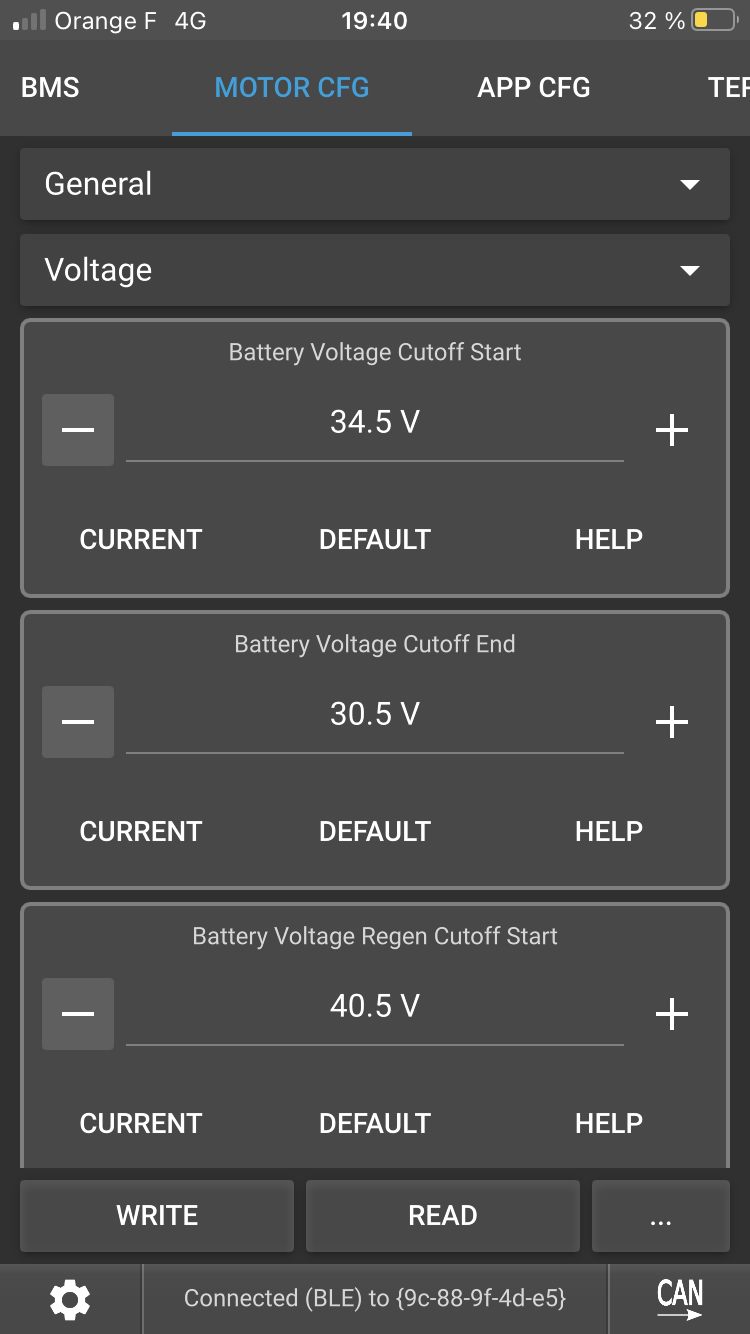
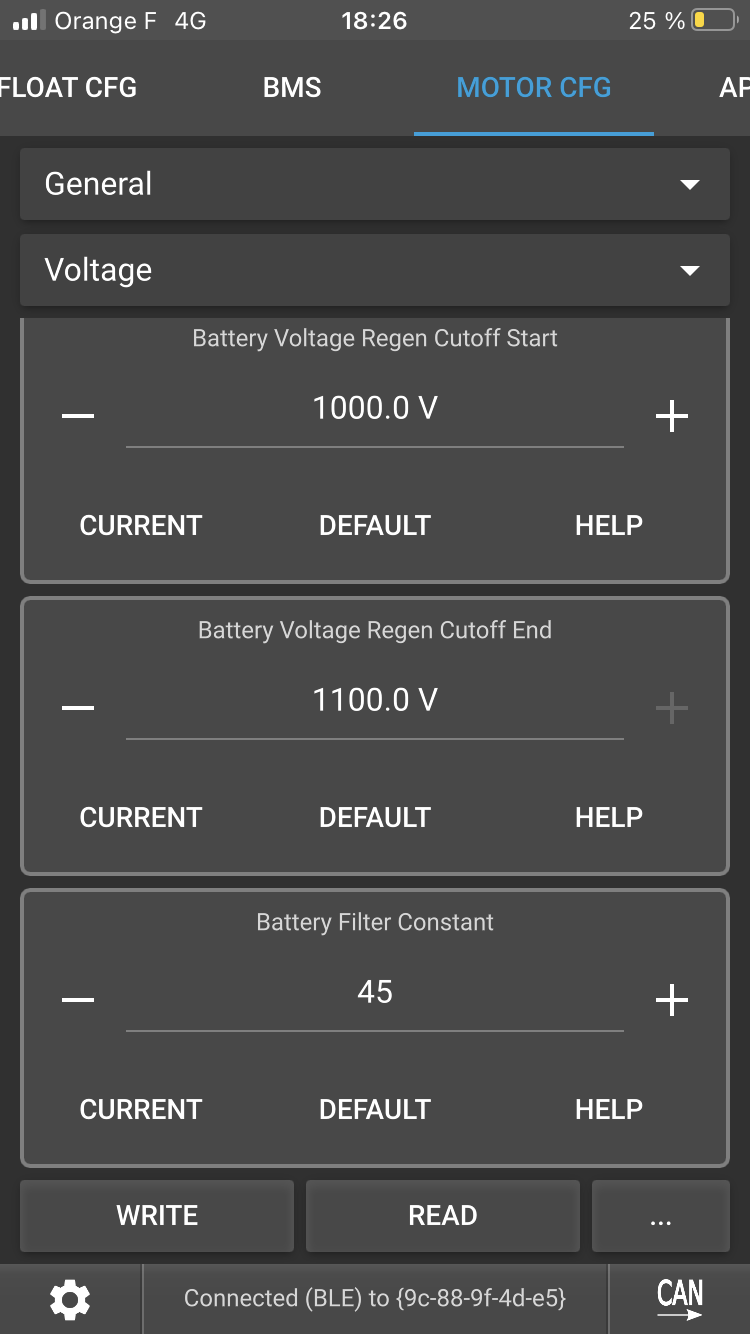
2. Battery Voltage Cutoff Values
(Motor Cfg > General > Voltage)
These settings limit the current drawn from the battery as it approaches lower voltage levels to prevent deep discharge, which can permanently damage the cells. Some riders ignore Low Voltage Tiltback, so these cutoff values act as a backup to protect the battery.
-
Battery Voltage Cutoff Start: Set to 40.5V
(2.7V x Cell Count - Pint/X & XR have 15 cells)
Begins limiting current to protect the battery. -
Battery Voltage Cutoff End: Set to 37.5V
(2.5V x Cell Count - Pint/X & XR have 15 cells)
Cuts off current to prevent critical damage.
Optional Rider Safety Adjustment:
If you want to prioritize rider safety over battery protection, you can use a 2.5V/2.0V approach for the Battery Voltage Cutoff values.
- Start: Set to 37.5V (2.5V x Cell Count - Pint/X & XR have 15 cells)
- End: Set to 30.0V (2.0V x Cell Count - Pint/X & XR have 15 cells)
Note: These values represent the absolute lowest end of the recommended discharge levels for these types of cells. Use them only if necessary and with caution.
![]() Important Reminder:
Important Reminder:
DO NOT ignore Low Voltage Tiltback! It’s your first line of defense to protect both you and your battery. Battery Voltage Cutoff values are a backup, but respecting tiltback will save your cells and prevent sudden power loss.
3. Battery Current Limits
(Motor Cfg > General > Current > [Battery])
The PintV and XRV kits come with these limits set significantly higher than the stock Pint, Pint X, and XR batteries are built to handle. These should be lowered to more realistic numbers to avoid harsh voltage sag and possible damage from requesting more current than the packs can handle.
- Battery Current Max: Set to 30A
- Battery Current Max Regen: Set to -30A
4. Field Weakening
(Motor Cfg > FOC > Field Weakening)
The PintV and XRV kits come with the Field Weakening Current set higher than what’s recommended for stock packs, along with other atypical Field Weakening settings. They should be set as follows:
- Field Weakening Current Max: Set to 30A
- Field Weakening Duty Start: Set to 60%
- Field Weakening Ramp Time: Set to 500ms
5. IMU - Accelerometer Confidence Decay (XRV Only)
(App Cfg > IMU > [AHRS])
This value affects how the accelerometer readings are filtered and interpreted. A value of 0.02 has been the standard for years. However, the XRV comes with this set to 0.1, which can cause negative side effects and will likely change how the board rides and behaves, compared to the same tune at 0.02. Be sure to make this change if you have an XRV kit.
- Accelerometer Confidence Decay: Set to 0.02
P.S. Backup Configs!
Once you have made all these changes and confirm the board is still ridable, feel free to Backup Configs again under the Start tab! That way if you have to recover again for whatever reason, you don’t have to make these changes again. Just be sure you set them correctly and didn’t make any mistakes before backing up.