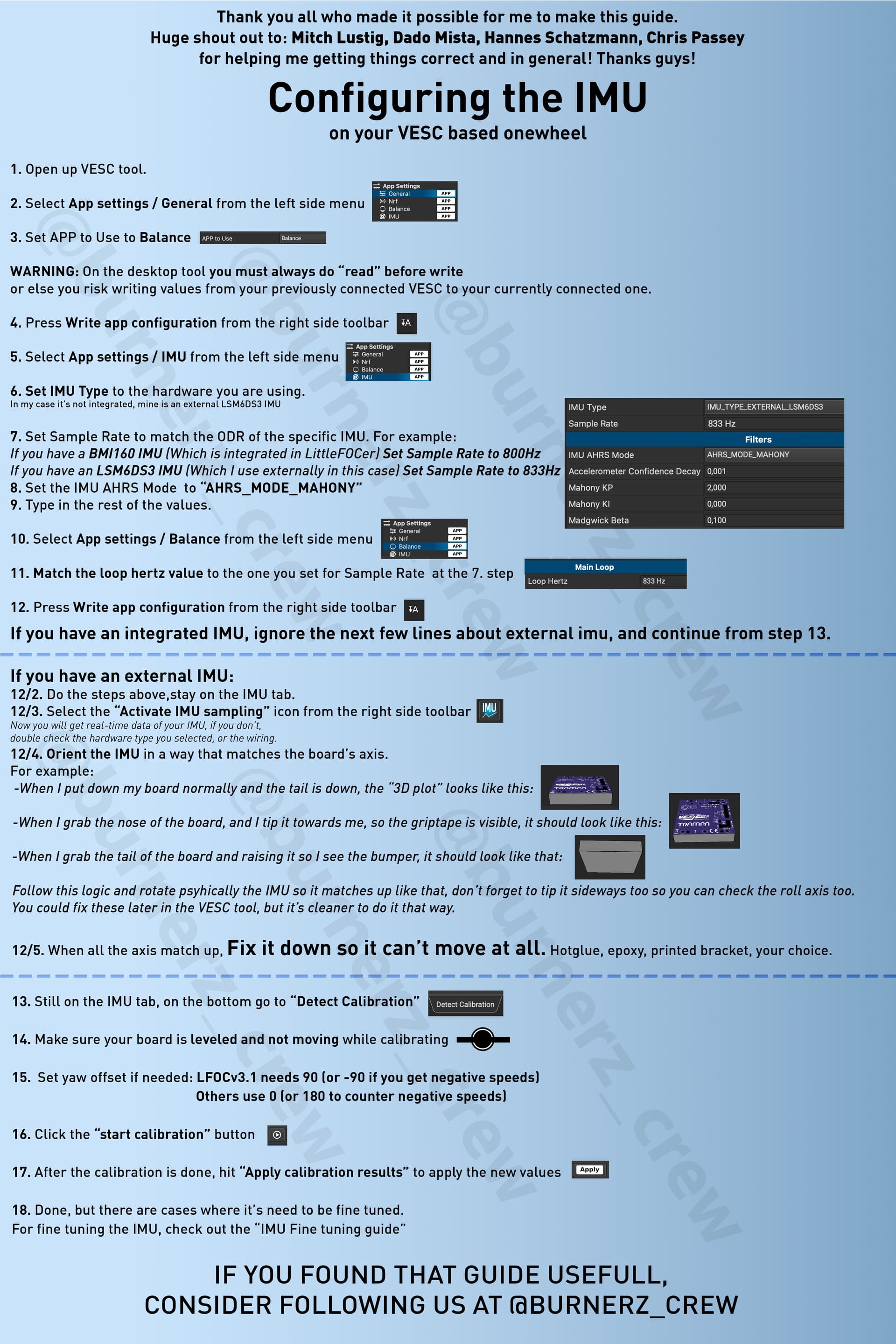
IMO step 3/4 in this guide should be either removed or amended. In fact hitting “Write” is dangerous when you have more than one VESC. On the desktop tool you must always do “read” before write or else you risk writing values from your previously connected VESC to your currently connected one.
Thanks for the headsup! I made the modifications to the guide, i updated the contents of the google drive link, i will refresh the post when i find out how!
That is a vital step if for some reason your LIL FOCR 3.1 did not come configured with it…like mine lol
Thanks @NicoAleman and @surfdado for the late night repsonse to fix this last weekend.
Another newbie tip: If you get all set up and notice your speeds are negative values, and you flip your Yaw offset, CHECK YOUR MOTOR DIRECTION AGAIN ON THE BENCH and invert if needed.
Otherwise you’ll have a very sudden and unpleasant dismount.
Im trying to get my first diy onewheel/openwheel to work but struggling on imu configuration. Tried with two LSM6DS3 but neither shows no real time data so I think its not my soldering or the IMU itself.
Does anyone have any idea what could be wrong?
Thanks
Tried to config it first but no detection and after a few attempts Vesc tool crashes
App to use has been on UART so maybe thats the problem.
Also when I changed app to use to balance and clicked “write app” my wheel stops spinning from bottom ribbons play buttons. Tire just jerks back and forth. Dont know if thats suppose to happen