This is a Tronic X12 controller issue - hall sensors seem to drift for the first 10 seconds after boot so the calibration on boot gets it wrong.
As always, if you have a working configuration, make sure to backup before starting this procedure!
Before starting, keep in mind that if you are using VESC tool 6.05 on Mobile to always “Read” settings before making a change and hitting “Write” just to be safe.
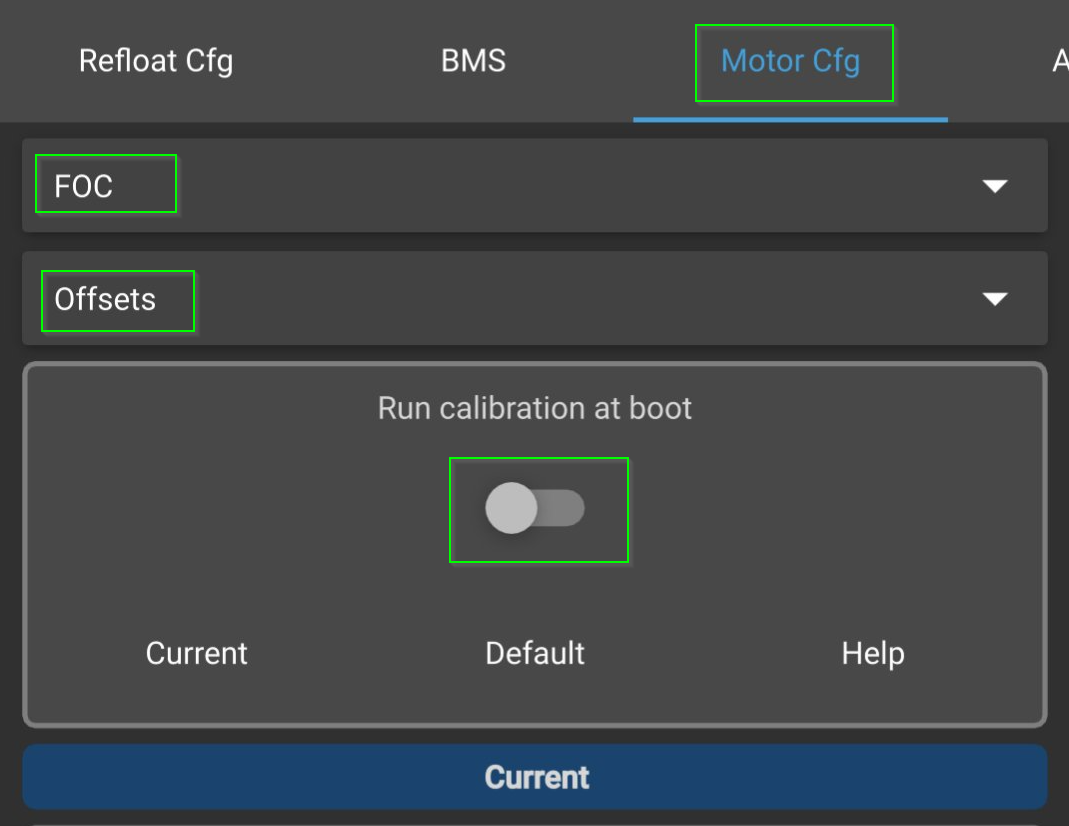
- First make sure “Run calibration at boot” is disabled in ‘Motor Cfg’ > ‘FOC’ > ‘Offsets’:
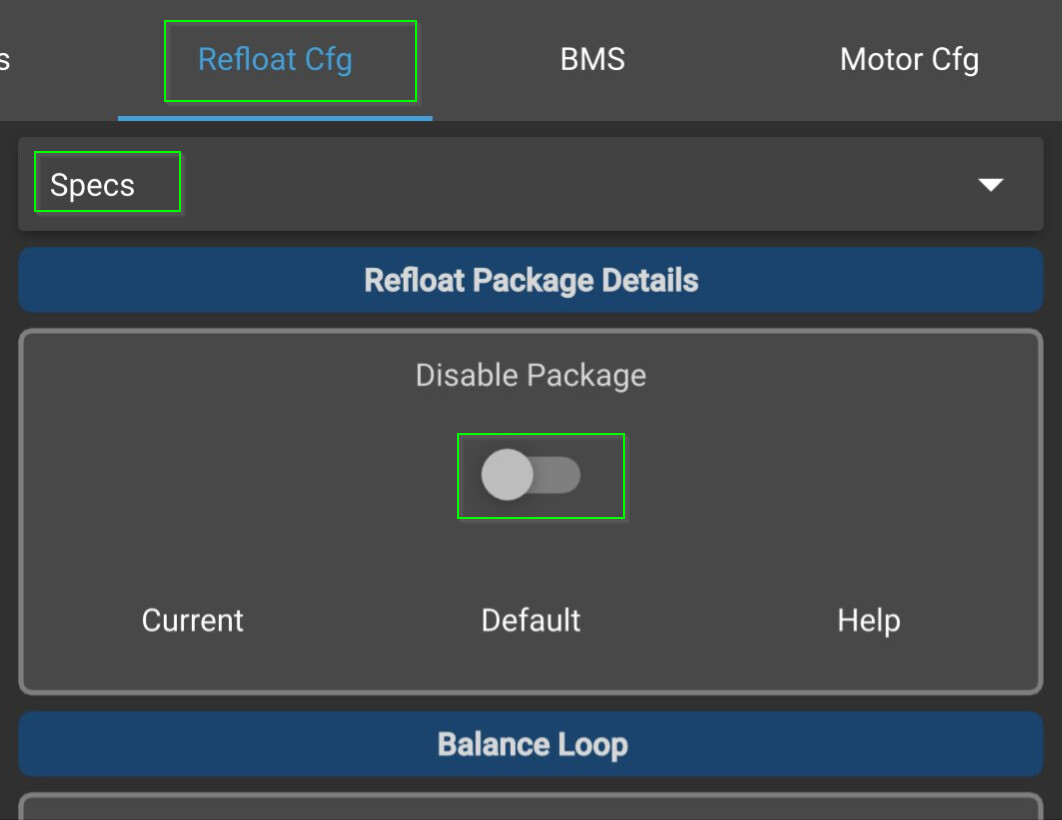
- Disable float/refloat package. Brake current can mess with offset measurements and motor config. We will be doing motor config after offsets are calibrated as well.
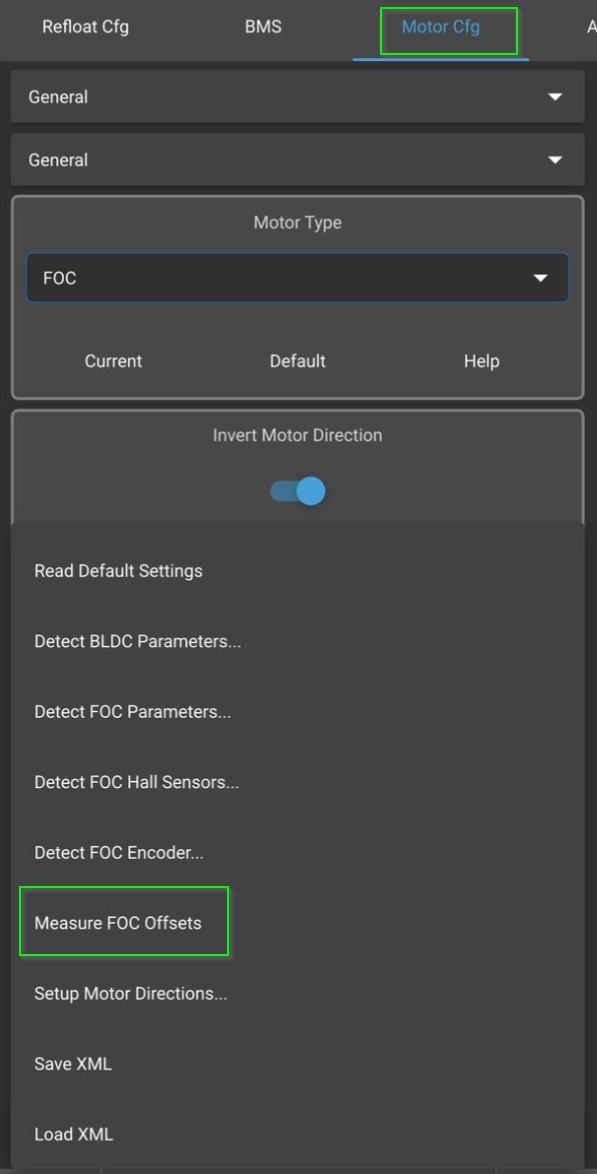
- Now we will manually detect the FOC offsets using either VESC tool on mobile or PC. On PC I don’t recall exactly where it’s at, but maybe someone can add a screenshot. If you are running VESC tool 6.05 on mobile, then you can run ‘Measure FOC Offsets’ by going to the ‘Motor Cfg’ tab and tapping the ellipses (…)(three dots at the bottom right) and then click on ‘Measure FOC Offsets’.
- Now you will perform Motor Setup Wizard as usual. Please follow the How To Configure Motor wiki.
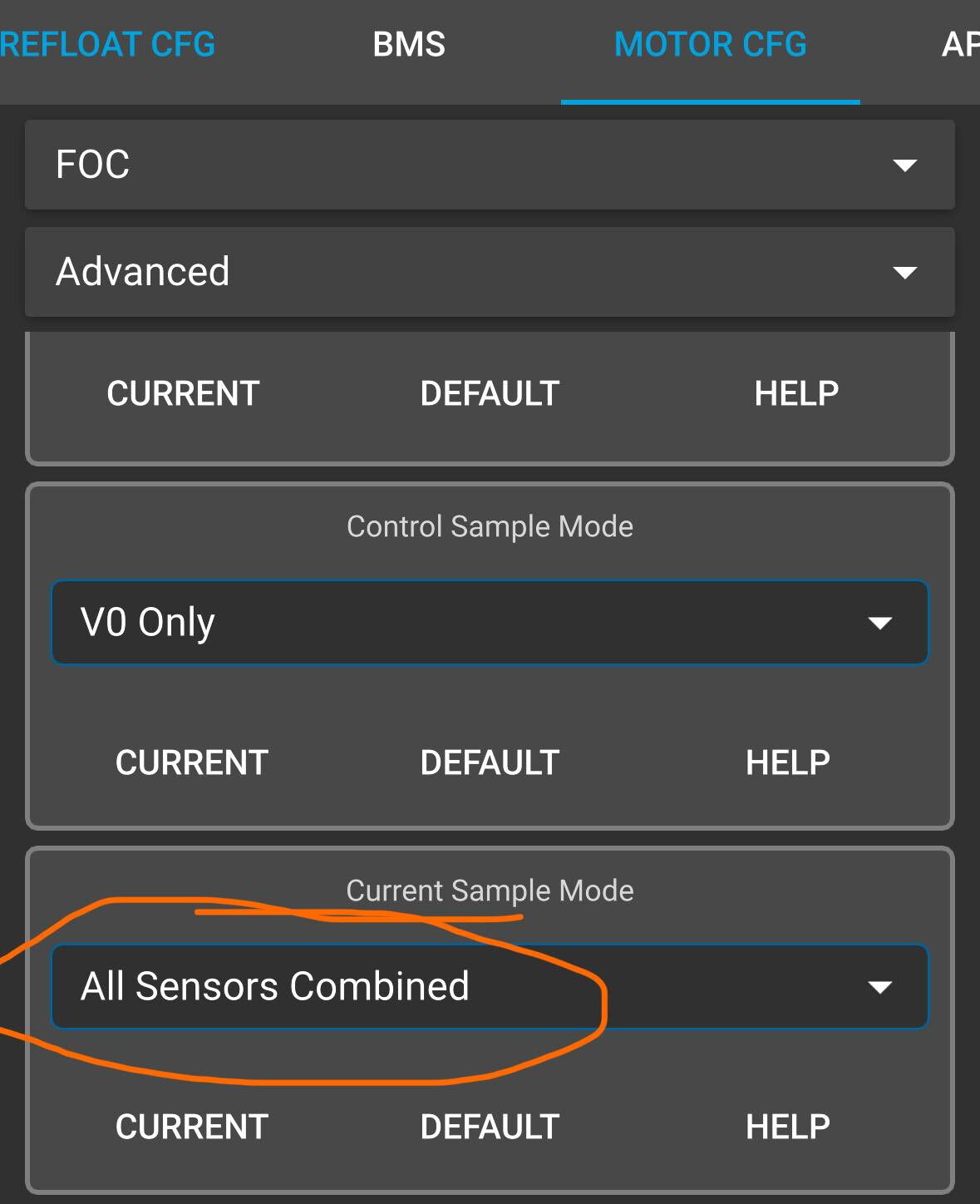
Additional Notes: If you still experience odd motor/ride behavior there is something else you can try for the x12. On the ‘MOTOR CFG’ tab > ‘FOC’ > ‘Advanced’, you can set “Current Sample Mode” to “All Sensors Combined”. I have not tested this yet, but it was a suggestion and results can be reported back here in the comments.