THE BELOW PSA IS NOW OBSOLETE, but will be kept for archival and context.
PSA to anyone who has recieved or will soon recieve the BKB Voyager V2, I am currently recommending you hold off just a tad longer before installing, to save yourself frustration and potential trouble. Fixes coming shortly through downloadable software updates, read on for more:
The current intended method of communication is over CAN, using a lisp script. This opens up some cool possibilities when it comes to potential features and customizability, but in its current state will require some work before I can recommend running it in this manner with the Float Package. Even getting it running concurrently this way is a bit of a process unless we build it into the package itself, so regardless, I would hold off on trying to run the remote through the CAN method explained in their YouTube setup video.
Getting this functional will be a future goal, but after discussions, they’ve shifted over to first making sure the classic PPM and UART methods of communication are ready to go. PPM was already implemented, but there were some issues I found that are now being worked on. UART functionality is also being worked on and shouldn’t take too long.
Basically, a focus on testing in the context of Eskate and some miscommunication led them to focus on this CAN method that unfortunately isn’t ready to be used in the context of Onewheels. Luckily, progress is being made with the focus on getting UART and PPM ready so people can get riding ASAP, then CAN in the future to unlock some cool new potential feature possibilities.
I’ll keep you guys in the loop once I feel confident in a method of getting this remote up and running. For now, I recommend holding tight for just a bit longer before installing. This remote has some cool potential stuff up it’s sleeve, I wouldn’t write it off just from some initial launch hiccups. Just keep an eye out for updates very soon Thanks for your patience everyone.
Thanks for your write up! I was just about to install it, but I will hold off for a few more days. Could you maybe elaborate what issue you found for PPM, just to understand why this is not (yet) an option at the moment?
There are a number of issues and concerns. Simply put, it’s not ready. It’s not a “try at your own risk” thing at the moment, but rather, anyone who tries will run into several issues; it’s just not ready to be run alongside the Float/Refloat Package like we need it to currently. Between requiring App to Use be set to PPM (which can cause a number of conflicting issues), ghost inputs on boot-up, extremely low poll-rate, not currently even being able to enable PPM mode without modifying the remote firmware yourself, PPM inputs being broken and unpredictable. The list goes on haha.
All of these are currently being addressed and most of them have been and are in testing. There’s still one or two critical fixes I’m waiting on before I’m comfortable giving people the go ahead. But hopefully that will be ready shortly.
hah found this after attempting the guide and now have learnt a bit about how it all works. I have 3 remotes and no shortage of boards so if you do need testing i’d be happy to give it a go. I have a large range of configurations too if it makes any diff.
Still waiting unfortunately. PPM is functional with some tweaks to the currently public scripts, but ideally those last requirements are fixed so I dont have to make a guide twice. And UART functionality is also still in development. There are technically ways to get things up and running right now, just not worth explaining it all when it should (hopefully) be fixed sooner than later.
With a CAN implementation, that basically opens the doors to allowing the remote to run any VESC command / function you want, among other things. This control allows for way more creativity in terms of the kinds of features we could implement, beyond just basic remote tilt, including utilizing even things like the buttons on the remote, the x-axis of the joystick, and even clicking in the joystick. It’s not any direct benefits naturally, but it gives developers way more control in what kinds of features could be made utilizing the remote.
Unfortunately, the updates BKB had been working on still weren’t suitable for our purposes of Remote Tilt. Luckily, I decided to bite the bullet and spent the weekend cranking out all the needed fixes, optimizations, and quality of life improvements to get things dialed
I don’t have the time at the moment to make a proper tutorial for setting up and updating, hopefully can very soon, and still need to do real-world testing to confirm the reduced latency and remote battery life is suitable. But if anyone was waiting to wire theirs up, you can at least go ahead and do so!
Wire the CAN on the side of the receiver (not the CAN port in the middle, thats for daisy chaining other CAN devices) to the controller, and wire the other 4-pin to either UART or PPM (if PPM, use the TX pin for signal). I highly suggest UART as it gives access to using the thumbstick click, remote buttons, and mode toggle for potential future features in Refloat, and it seems to perform better currently, but PPM is available if necessary.
Please note, for those of you without a CAN port (Floatwheel/GTV/XRV/PintV), you are in a bit more of a predicament, as CAN is required to be able to access the receiver in VESC Tool and update it. I’d imagine you’d have to take advantage of another controller that does have CAN for updating. That said, once updated, it does work with just the PPM or UART connection alone, CAN is only required for updating.
Just wanted to share an update for those who were waiting to at least be able to wire theirs up. Just note, I would not turn on the remote and receiver at the same time until you’re able to update, as the remote is able to throttle it with the default firmware. Hopefully I can update you guys sooner than later on how to properly update (if you try to follow their YT guides, SKIP the code_server lisp script to your board, this wipes the Float Package and isn’t necessary for us)
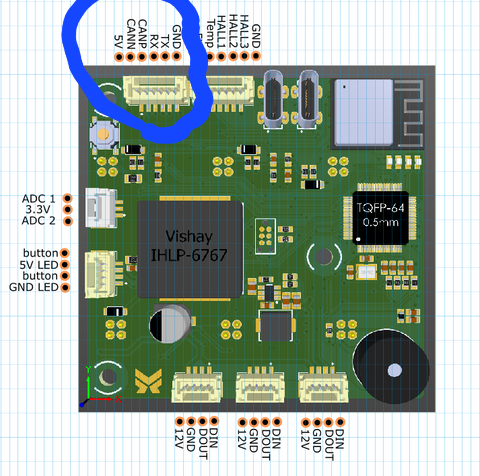
You the man! Thank you sir. On Thor300, are all those connections made through this port (can and uart)? Would you be so kind as to list the bkb connection > thor pinout descriptions?
Correct, though I’m not sure the best way to split the 5V and GND connections, I might actually try to test if you even need to or if you can just put 5V and GND on just one of the Receiver connections. Im also not sure how CAN P and CAN N correlate to the typical CANH and CANL like on the receiver, I’m not familiar with Thor and am not aware off the top of my head how that maps out
Which worked out just fine - as Nico said in the video you don’t need the GND and 5V on both connectors. In my case just having them connected via the CAN port was enough.
Only thing I don’t know how to solve though: How can I change the units on the remote from mph to km/h??? I don’t use imperial units!
Nevermind, if you change (def UNITS 0) to (def UNITS 1) in the main_voyager.lisp script it shows km/h. I’ll do some testing!