Makers-PEV-Fully-Assembled-Flowglider-Box-Setup-1.pdf (1.6 MB)
3 Likes
In vescmann’s video he just swapped the FM controller to the flow glider. It looks like he’s just using the stock battery harness. I followed his instruction and was not able to power on the board. Do i need to buy the harness and rewire? Also is the XT60 adapter of step 10 used to swap polarity for stock XR battery?
I have the same 2 questions. Very new to this and also followed @vescmann YouTube vid. Thanks for the help guys! @makerspev
ok at least reassuring to know this is a common issue.
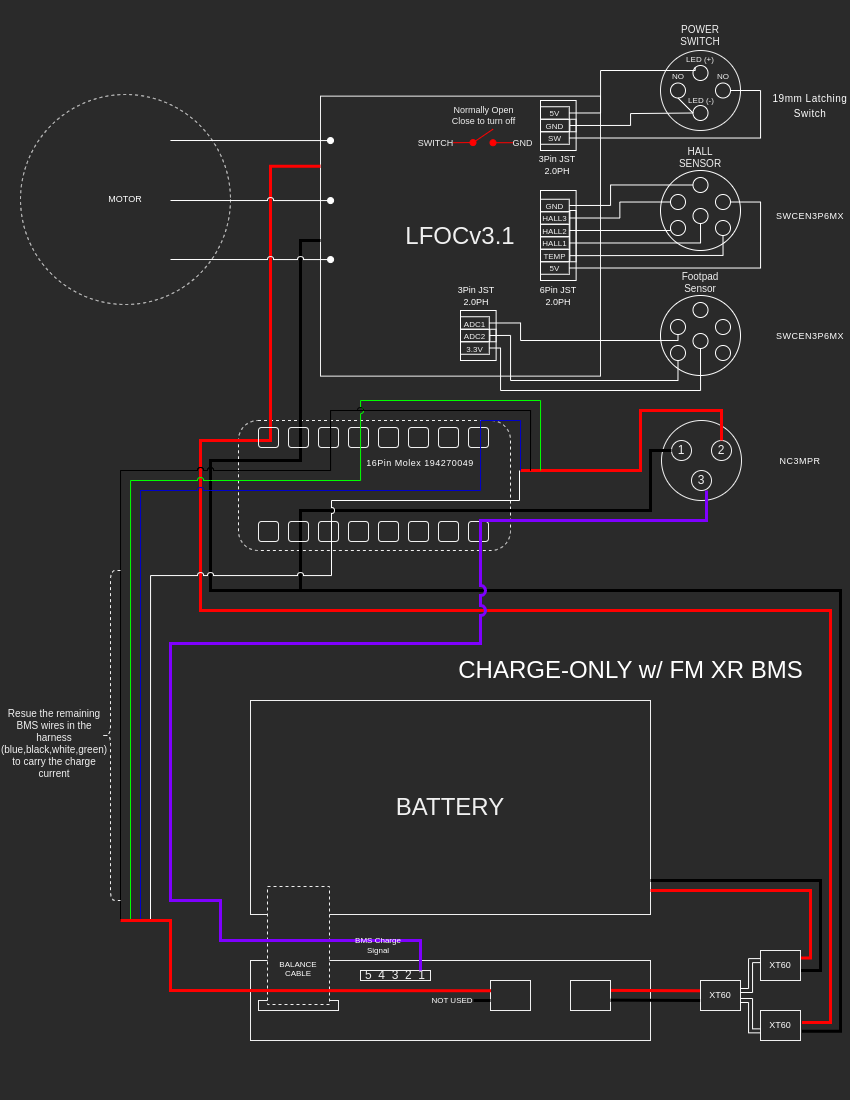
I opened up the box and see that there are only two wires connected to the 16 pin battery plug. I’m going with a stock XR battery with charge-only BMS and I think the way this box is setup is for no bms with makerspev harness? So I think it might be best to just rewire according to this diagram and reuse the stock harness:
I am also very new to this and have no idea what i’m doing. would appreciate if someone can verify this.
The battery harness only uses the two (negative / positive) leads. The rest is abandoned. Confirm you removed the BMS and swapped the polarity of those power leads inside the battery box? (probably with a short XT60 adapter from
Makers)… You fried your controller If you did not do this first?
I left the rest of the XR as is. Vescmann said just plug and play so I just plugged and played…
I did the exact same thing on a fully stock XR (stock BMS)… Really hope the Vesc is not fried…
Additional info, swapped back to stock controller and works fine.
Quick update, managed to make it work! For me it was the stock BMS not liking the latching switch, so no power was being sent to the controller. For now, I’m not using the BMS, but once my OWIE chip is setup, ill use the stock BMS and follow these steps to charge and monitor battery. OWIE Wiring & FW (Use FM BMS for 15s VEXR) - FAQs & How-tos - pev.dev
cheers
1 Like
I don’t use the bms. The stock bms has been removed.
1 Like
Update and more questions: I have removed the stock BMS and have gotten it to startup. I followed the configuration but the motor is now making a high pitch sound anytime it moves/when i manually rotate the wheel. Also when I activate both sensors the wheel immediately ramp up to 100% duty cycle even though the board is leveled on a milk crate (RT data page shows the board is leveled). What am I doing wrong and which setting should I change to make it work? Thanks!
That high pitch sound is normal, and is because the motor is active and applying holding brake current. You can tweak this sound a bit by adjusting Zero Vector Frequency under Motor CFG → FOC → Advanced. Values of 20-30kHz are commonly used, surpassing this can be dangerous and risk bricking your controller, so stay in this range. This will also effect the motor’s whine/sound while riding, so I would tweak this once you’re able to test that aspect as well.
For the free spin, I suspect you have your IMU Rotation Yaw offset 90 degrees from what it should be, which causes Roll to affect the Pitch reading and vice versa. For Little FOCer v3.1 in a FlowGlider enclosure, IMU Rotation Yaw should be 90 degrees. Follow this guide starting at 3:56 in order to troubleshoot this: https://www.youtube.com/watch?v=vVvjHY5lFLs&feature=youtu.be
1 Like
The video is very helpful and I got the board to work now!
The high pitch sound is much louder than any onewheel I’ve heard. I can hear it on busy city streets. My Zero Vector Frequency is set to 25kHZ. Is it normal to be that loud?
Also when I brake super hard the motor crunches a lot. I have my max current set to ±120 A. I tried re-calibrating the motor and it won’t go away. What can I do to fix it? Thanks!
Hard to say if its normal just going off the description of “loud” haha, its certainly louder than any FM Onewheel.
For motor crunch, try setting Motor Resistance (Motor → FOC → General) to 110 or so, maybe a bit lower if you experience any negative side effects. Reference this thread: Motor crunch troubleshooting
1 Like
Upping motor resistance to 120 solved it! Thanks!
1 Like