Hey I want to bring up something that I miss from FM boards that I feel really give a degree of confidence/safety/and consistency to a ride. (Lots of text coming!)
Problem description
Ashton: Everyone is familiar with XR’s surge, and if you really push your board you know what riding surge is. Now surge imo was put in the programming as a “oh shit the nose is dipping give it all the beans so the rider doesnt eat shit, and keep giving the beans until the setpoint is reached again” but even though that may have been its main purpose, its secondary purpose to me evolved into a way to see “how much power do I have available right now?” If you are crusing at 18mph and you push the nose down on the XR, you will go into surge, and the amount of that surge feeling is a very good indication of how much more you can push the board beyond what you are doing right now. FO example, at 12 mph if you push into surge you get a pretty hefty nose up lift meaning you can push that same amount back and still be safe, if you do the same at 20mph the surge is there but much less forceful, meaning you are approaching the limit of your torque and you can only push it a little bit more. I use this technique on FM boards all the time to gauge how much more I can push it and it works really well. Also, while riding in surge you can be gauranteed that the power output wont change, the board is giving everythign its got during surge and it will not suddenly reduce or increase power output. thats there the “consistency” part comes into play.
How does VESC balance behavior work?
Ashton: The power output is mostly linearly proportional to the angle of the board. you can make this less linear by using booster but the booster response is also linear its just at a steeper angle.
Dado: Power output is highly non-linear due to the integral component. It may only feel near-linear at low speeds for the first second or so. And let’s keep booster out of this, booster is practically irrelevant at high speeds
Ashton: What this results in ride wise is no way to really know how much bpower the board has available unless you actually stuff the nose into the ground, for me this means I have a feeling of less confidence because im never easily able to be aware of the power reserves of the board, and also the nose always feels dippy all the time reducing confidence and consistency in the boards ride.
When you combine that linear response with the heavily filtered imu, I even suspect that the vesc sometimes will reduce power on you while fang/nose dragging due to pitch measurement errors. I have felt this before while fang dragging and having the board decelerate under you while you are requesting max power is def not confidence inspiring.
Ashton: So i think FM really got it right with SURGE.
Dado: it’s easy af to nosedive with an XR, almost impossible on a VESC… just saying… I would actually argue that at higher speeds FM’s last-ditch attempt at giving you surge could even be the cause of nosedives? But I’m just speculating…
Requested Feature
Ashton: What I would love to see is a surge setting, with options for the nose angle at which to apply it, and it would boost power output to the max setting you have input, and hold that power output until the board is nearly level again, or setpoint is reached (not sure which would be preferable).
Dado: Several problems with the request as you formulated it. #1 this isn’t at all how surge works on the XR, #2 This feature you request is basically already available - set booster to 10 degrees, ramp 3-4 and 100A and you will never be able to do a nosedrag again… but who would want that?
Ashton: Here are some graphs showing the power flow between the two boards. Black is as the nose is dipping, and red is as you are returning to level.
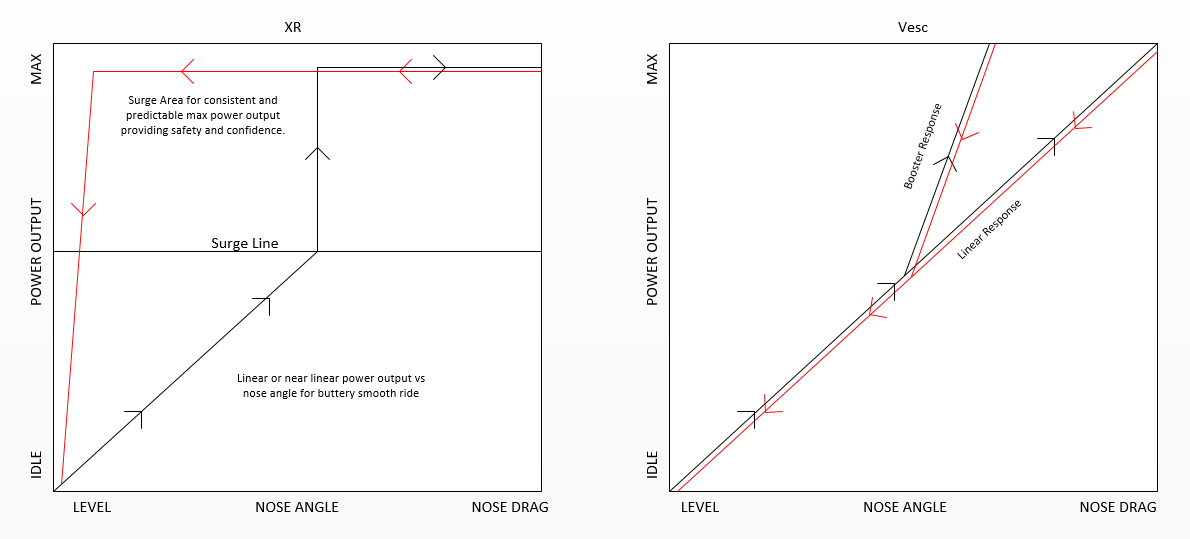
Dado: I believe these graphs are oversimplified and therefore misleading for this discussion. When I get a chance I will try to produce better graphs, but maybe it’s better to just ignore them for now…