This condition can occur if you have your IMU Rotation Yaw and Motor Direction set incorrectly. The board will balance and ride in the desired direction as normal, but the RT data will report negative values for ERPM, Speed, and Duty Cycle.
If you are experiencing this issue, while it may seem safe to ride, there are certain features that rely on knowing which way is forwards and which way is backwards, and this issue could cause weird behavior, unexpected cutoffs, or even guaranteed ghosting when using these features (most notable being Reverse Stop, Darkride, and Disable Moving Faults).
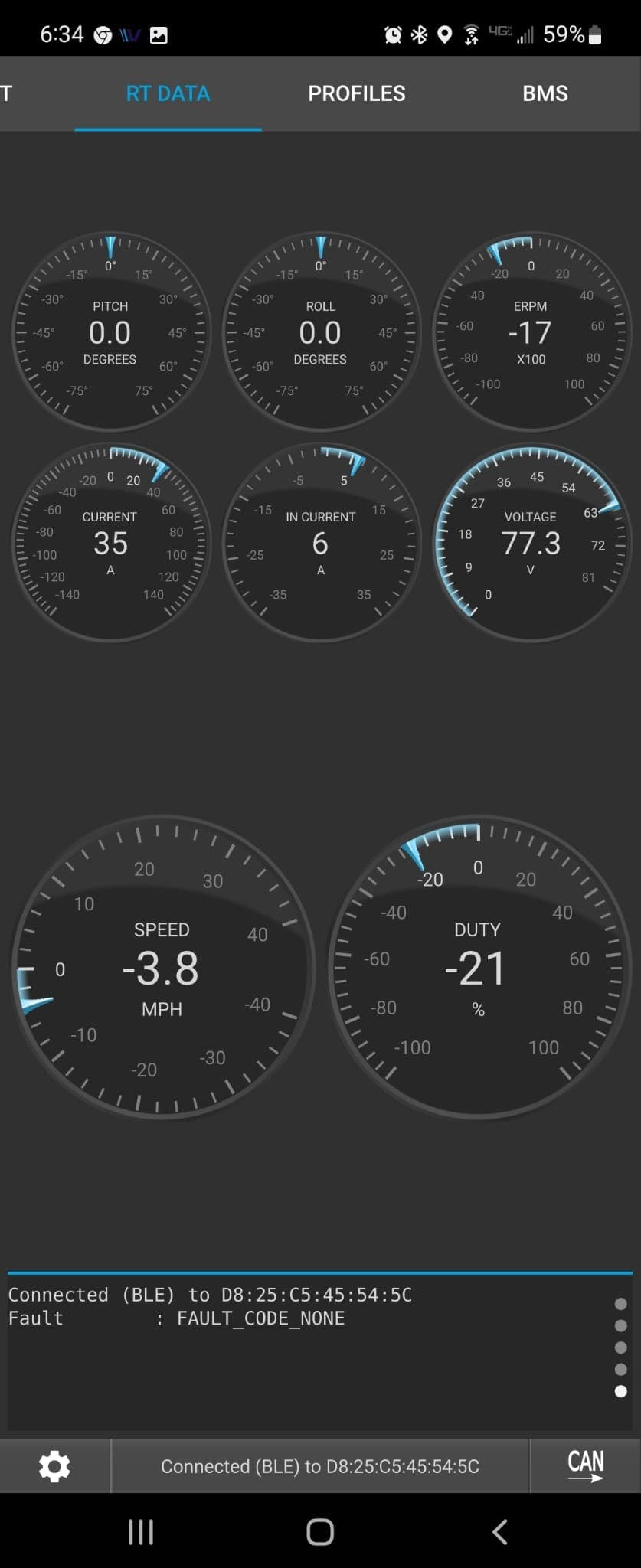
Example of the issue:
How to Fix
TLDR:
- Backup Configs
- Flip Motor Direction toggle (Motor CFG → General → General)
- IMU Setup → IMU Orientation → Skip Roll & Pitch → Raise NOSE 45 degrees for Yaw (should say +/- 180) and save
- Confirm Motor Direction using AppUI → Controls
- Confirm IMU Orientation using RT Data
First, as always to be safe, go to the Start tab (or ConfBackup on the top Menu Bar for desktop VESC Tool) and tap Backup Config so you have a fallback in case you get lost or screw up somewhere.
Second, invert your motor direction from what it is currently, under Motor CFG → General → General
Third, go to the IMU Wizard, do IMU Orientation, skip pitch and roll, and once you get to IMU Yaw, raise the NOSE of the board up, NOT the tail. If you watched an older 6.0 setup video, raising the tail was a workaround for a bug. That bug has since been fixed, so you should now raise the nose like the wizard says to. The offset should say either 180 or -180, indicating you are flipping your yaw 180 degrees from the current value, which should invert it back to how it should be.
For clarification, the reason this is done in the IMU Wizard instead of manually changing your IMU Rotation Yaw by +/- 180 is that the IMU Wizard will automatically adjust your gyro and accel values as well to accommodate this change. Otherwise, you would have to recalibrate Gyro and Accel afterwards.
You can confirm success by doing two things. First, go to AppUI, Controls, and use the Movement Controls slider to confirm correct motor direction. Moving the slider right should roll the motor forwards, and left should move the motor backwards. Then, go to the IMU section of the RT Data tab and confirm that when the tail is on the ground, the roll angle is near 0 and the pitch angle is positive 20-30 or so, not negative.
If you clear both these tests, it should be safe to test by hand. If that checks out fine, it should be good to ride.