Setpoint Smoothing
There is a description of the Setpoint Smoothing in the release notes, to reiterate and expand on it:
In Refloat 1.0, Setpoint transitions (for ATR and all the Tilts, the new smoothing is right now only available for ATR, Torque Tilt and Input Tilt) are linear, defined by the configured speeds (Max Tiltback Speed and Max Tiltback Release Speed for each of the Tilts). If these speeds are set too high, the movement is jerky. These experimental filters attempt to smooth out the jerkiness while allowing higher tiltback speeds.
The main configuration of the filters is on the ATR tab! You can set a different type of filter for Torque Tilt on the Tune Modifiers tab and a different Input Tilt filter on the Remote tab, but the configuration of the given types is always only one, on the ATR tab.
The filters were designed primarily with ATR in mind. They can be applied to Torque Tilt, likely with different values (I have not tested them with Torque Tilt much at all). For Input Tilt the requirements are certainly different and not that demanding. The behavior described and depicted below is for the most part not necessary for Input Tilt and some sort of a simplified version will be used for the final release.
3-Stage Filter
The 3-Stage filter has 3-Stage Alpha as the main configuration parameter, the higher the value, the less filtering (and faster response).
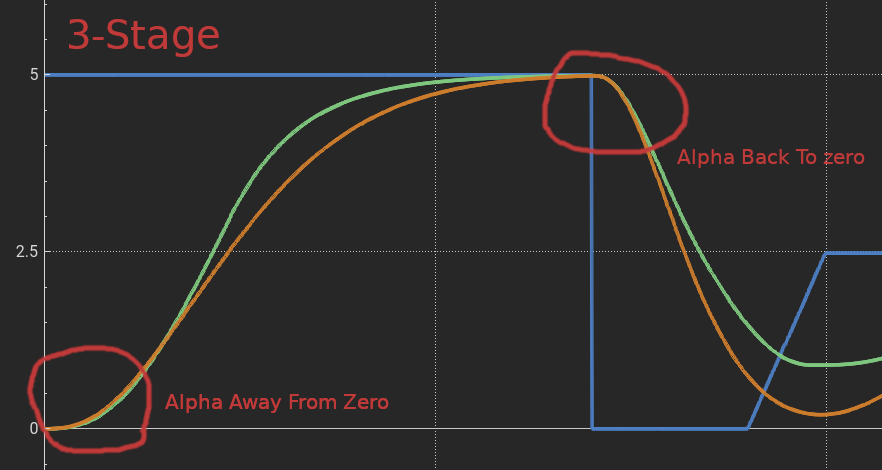
It has two additional parameters, 3-Stage In Alpha Away From Zero and 3-Stage In Alpha Back To Zero (again, the higher, the less filtering). These are best explained on a picture:
Imagine a sudden change of setpoint from 0° to 5° (Blue). The Green line provides a nice smooth transition, while Orange is even a bit smoother (and slower) when going up, but faster (and therefore less smooth) when going down. While the main Alpha defines the overall smoothness, the two extra alphas define specifically the two transitions marked on the picture.
This customizability is mainly intended for ATR, which in itself has a certain natural delay. I would say the most annoying effect of the delay is the lingering setpoint after transitioning from a hill (up or down) to flat. Hence, let’s try to smooth out the Back To Zero transition as little as necessary, so that the lingering setpoint goes away as fast as possible. Then, the overall speed of the filter is defined by the main Alpha, which should have a balanced value for an overall speed of the filter and to define the transition “towards” the new target (the two unmarked transitions the picture, when the curve reaches it’s new target). Lastly, the Away From Zero transition can be used to slow down and smooth out the initial “into a tiltback” transition, so that the ride feel is smooth overall, with no jerkiness on small bumps.
3rd Order EMA
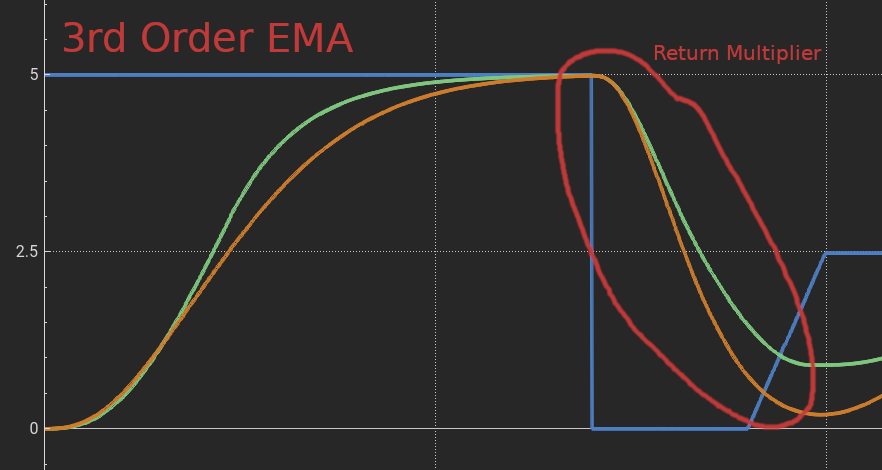
The 3rd Order EMA is a more standard filter, defined mainly by the EMA Half Time parameter (the higher the more filtering, i.e. the opposite of 3-Stage!). But, it does have the EMA Return Multiplier parameter to speed up the whole transition back to zero (the higher, the faster it goes back to zero), picture:
Use the defaults for both filters as a starting point for a smooth ride, for ATR You can use these starting values for Torque Tilt and Input Tilt too. They may not be optimal and you’ll likely have to tweak them.
On top of these filters, the Tiltback Speeds (Max Tiltback Speed and Max Tiltback Release Speed) are still applied, you need to set those much higher than what you used before the smoothing. Recommended values are around 20°/s (these are the default on this version, but you will have your old values if you restore your config).
Note: For ATR, the Tiltback Response Boost and Tiltback Transition Boost are not applied if you use the 3-Stage or 3rd Order EMA filters.