I am wondering if it is possible to make a Vesc based wheel to hold position on slopes when i am not standing on it.
That means, when i am not engaging the foot sensors, i want the wheel to initiate counter steering just as it is known from two-wheeled robots as seen in this video: Balance robot by Antun Skuric
This will be helpful to transport things on the board.
The action sequence should look like this:
1: Board sensors disengaged: board balances and does not roll away on slopes.
2: Objects are placed on both footpads, engaging the foot sensors.
3: the board should now start the standard active drive mode and just balance as it normally does an be pushed wherever it needs to go (standard riding)
4: Take the object off and the board stays horizontally balanced, but doesn’t roll away.
How can this be realized or has it been been done before?
This wouldn’t work unless the nose and tail of your board are perfectly balanced. If they aren’t balanced and the board still tries to hit a ~level nose angle, you now just have a ghosting board.
That’s exactly the problem. But it has been solved for two wheeled robots as shown in the video. It doesn’t roll away, even with an off center gravity point. What we need is to apply this code to the onewheel, so it can toggle between the ghosting mode and the position hold mode.
The same logic wouldn’t apply to a onewheel unfortunately. He is working with an inverted pendulum, so changes in angle wil shift cg. A onewheel is only an inverted pendulum with a person standing on it or while standing on end (in flywheel mode)
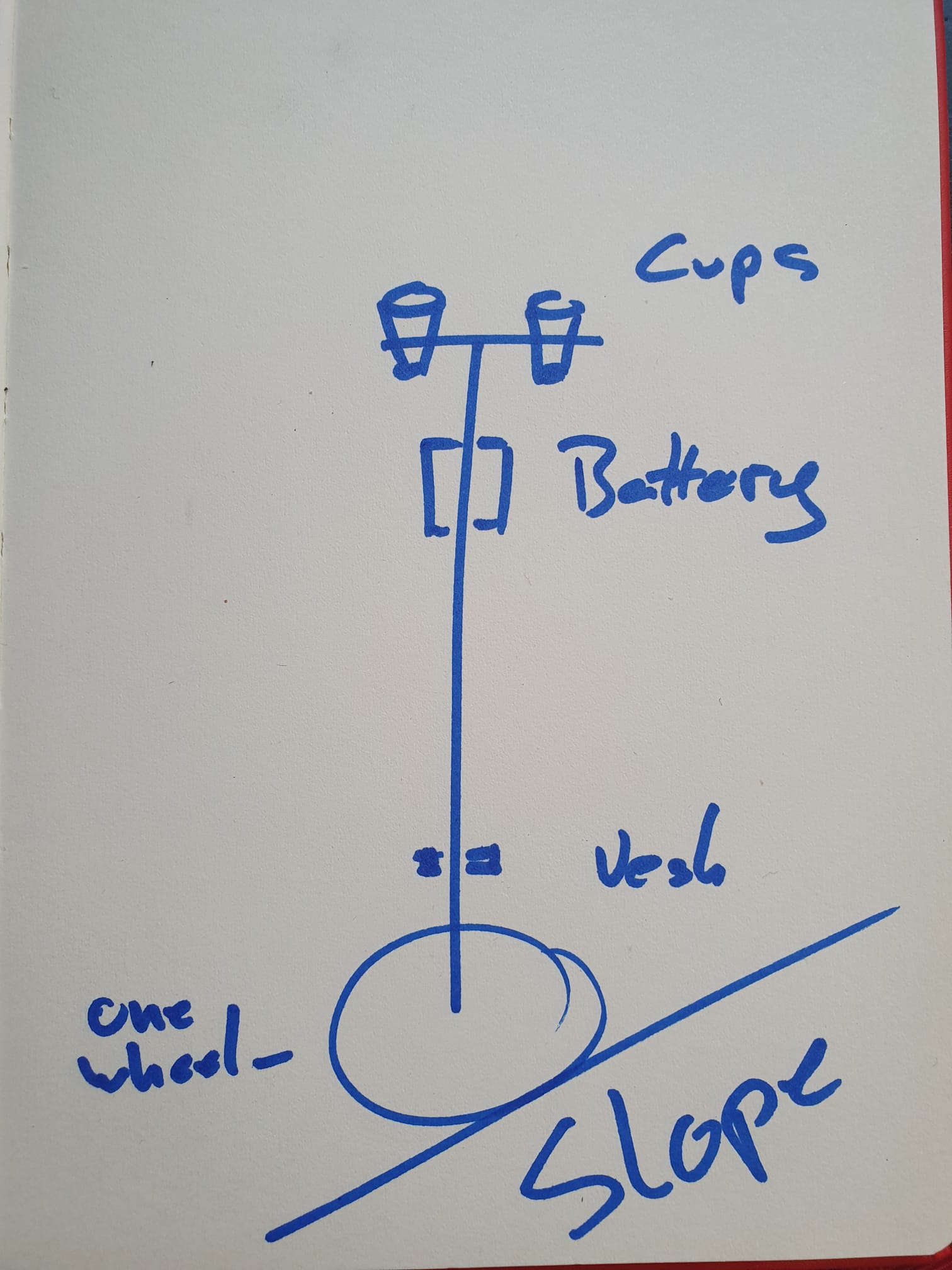
if we assume, i would like to build a onewheeled cup holder, can i incorporate code that makes it countersteer when on a hill at the push of a button? see sketch.