EDIT: Not compatible with VESC FW 6.0 / Float Package!! Meant for use on Dado's older 5.3.006 FW
WARNING: NEVER LOAD A TUNE CARD IF YOUR BOARD ISNT RIDEABLE YET
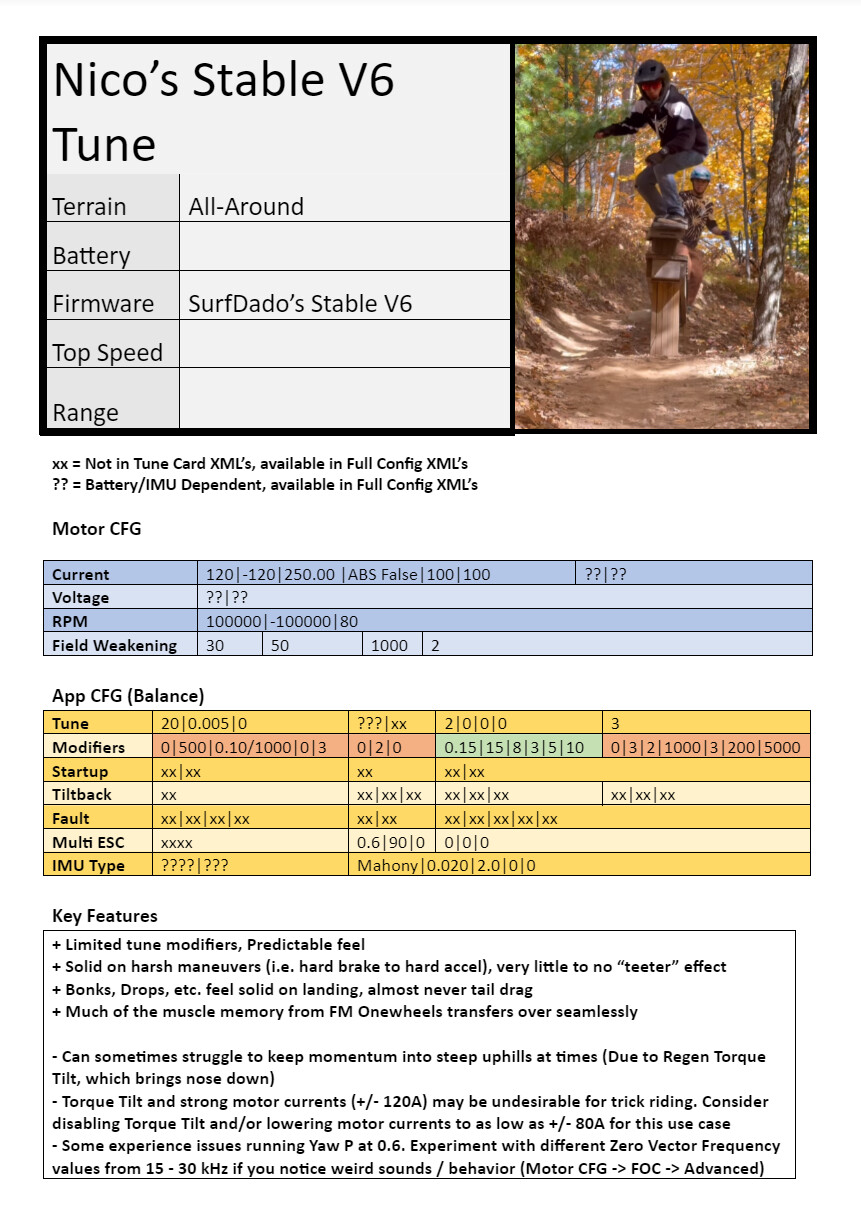
Hey y’all! Many of you guys enjoyed my previous tune, and with Mitch’s latest IMU fix, I’m happy to say that things are pretty damn dialed! Things are much more simple this time around; my Tune is very minimal, with very little use of tune modifiers. The ride feel is, in my opinion, extremely predictable, consistent, and for those coming from an FM board, definitely a bit familiar! The IMU fix also allows for some crazy versatility, and you’ll find that once you’ve tweaked things to your own preferences, you really don’t need to touch it whether you’re riding trail, street, or even trick riding.
The “Secret Sauce” of the tune is easily the Yaw P value of 0.6. For those who don’t know, Yaw P in Stable 5.3.006 is a placeholder used for a value called “Rate P” (as opposed to standard P, which is also referred to as Angular P). With this set at a fairly high value of 0.6, much of that teeter-y, trotter-esque feel is practically eliminated, as it will start accelerating the moment the nose starts dropping, rather than just once you’re below level / setpoint. This creates a ride feel MUCH closer to what people are used to with an FM board, and a feel that I personally consider smoother, more refined, and much more predictable.
That said, I don’t want to ramble on too long, as outside of that, this tune is pretty damn basic. More details are listed on the tune card itself. It’s certainly a “base,” so feel free to tweak things how you please!
With the Tune Card itself being pretty minimal and versatile, I wanted to do something special alongside it, so I have created a pretty expansive directory of XML’s for whatever configuration you may need!
First off, XML’s of just the Tune Card alone are included, where any unnecessary/personalized values are left out (battery spec, startup, faults, tiltbacks, IMU calibration, etc.). This means that, assuming you are already up and running with a functional tune/configuration, these should be safe to just load and ride! That said, please do still make a backup, just as a precaution.
However, for those of you who are just building their first VESC, or even those of you who just want to make sure they have a solid config, I have put together XML’s for FULL CONFIGS that include reliable starting values for things like Startup, Faults, Tiltbacks, Battery Currents, Voltage Cutoffs, and more! Just follow the directory, selecting your specific Controller/IMU and Battery, and load up the designated configs!
Please note, these are NOT a replacement for IMU Calibration and Motor Setup. These steps must be completed first, unless they are done already (i.e. MakersPEV’s Preassembled Controller). Hannes has a great tutorial on this process. Once these are done, just load up your respective full configuration, and you should be good to go!
If anyone has any questions, comments, or concerns, either with my tune card or the Full Config directory, feel free to leave a reply in this thread so we can get you sorted! I’ve gotten amazing reception with this tune from those who have tried it, and I personally prefer it over FM firmware in basically every scenario, so I’m stoked for everyone to try it themselves and want to help however I can if anyone faces any issues getting it up and running. I hope you all enjoy it as much as I have been! ![]()
Tune Config Download: Nico's Stable V6 Tune - Google Drive
Common Issue:
If you experience strange noises or behavior due to setting Yaw P to 0.6, the most common fix is to simply experiment with different values for Zero Vector Frequency, located under Motor CFG → FOC → Advanced. Values from 14-30 kHz should be safe, but avoid going beyond this, as you risk damaging your controller. Try different values in this range, you will likely notice that different values will have different effects on the sound/resonance of the board while engaged. Find what works best for your board! I prefer to stay in the 25-30 kHz range personally, as the whine is usually much less jarring IMO. If this does not solve your issue, please consider making a new thread so we can troubleshoot it!
Pro Tip:
Even if you only need the Tune Card, I highly recommend holding onto the Full Config version of the Motor XML that matches your personal setup. With this, following any future Motor Setups, all you have to do is upload this XML and write. No more remembering what values need to be entered where ![]()