Tony has been making claims about reaching high speeds by using 80A field weakening. There are several reasons why this is not safe yet.
#1 it hasn’t been tested in the field yet
nosedive prone balance vehicles aren’t the best devices for testing this out.
The most that has been tested fairly thoroughly so far is 50A - and it seems to be stable.
We should ask the guy with his giant Dyno setup to test some corner cases for us - if Tony promises to send him a replacement wheel if something breaks
#2 some early tests at 70-80A have shown nasty side effects
I’ve seen a recent video where a board couldn’t disengage after a freespin with 70A or 80A FW
Further evidence at 60A, from Snoo’s comment below:
“Originally, the field weakening was set to 55A. When I bumped it up to 60A and beyond, weird things started happening at high speeds. The duty cycle fluctuations got notably greater, which risks causing a motor shutdown. Mind you, I ride my Floatwheel at an 85-95% duty cycle.
I did initially change the % at which field weakening kicks in. However, narrowing down that range made the fluctuations even more unpredictable, almost like playing Russian roulette with cutoffs. In short, keep it at around 60%.”
UBox Alert: one UBox80V recently died during freespin at 45A FW (fully charged 18s pack)!
#3 the phase wires aren’t designed for more than 30-50A continuous currents
The Floatwheel phase wires are actually much thinner than on the SuperFlux (CannonCore phase wires look like 14AWG, SuperFlux uses 12AWG) - motor cable is 7.0mm vs 9.4mm on the SuperFlux
#4 VESC firmware v6.2 doesn’t adhere to battery current limits when field weakening is in play!
v6.5 beta has better support for this but it just got added last week, so wait till it has been tested some more
Here a screenshot for evidence how 50A field weakening caused battery current to exceed 90A:
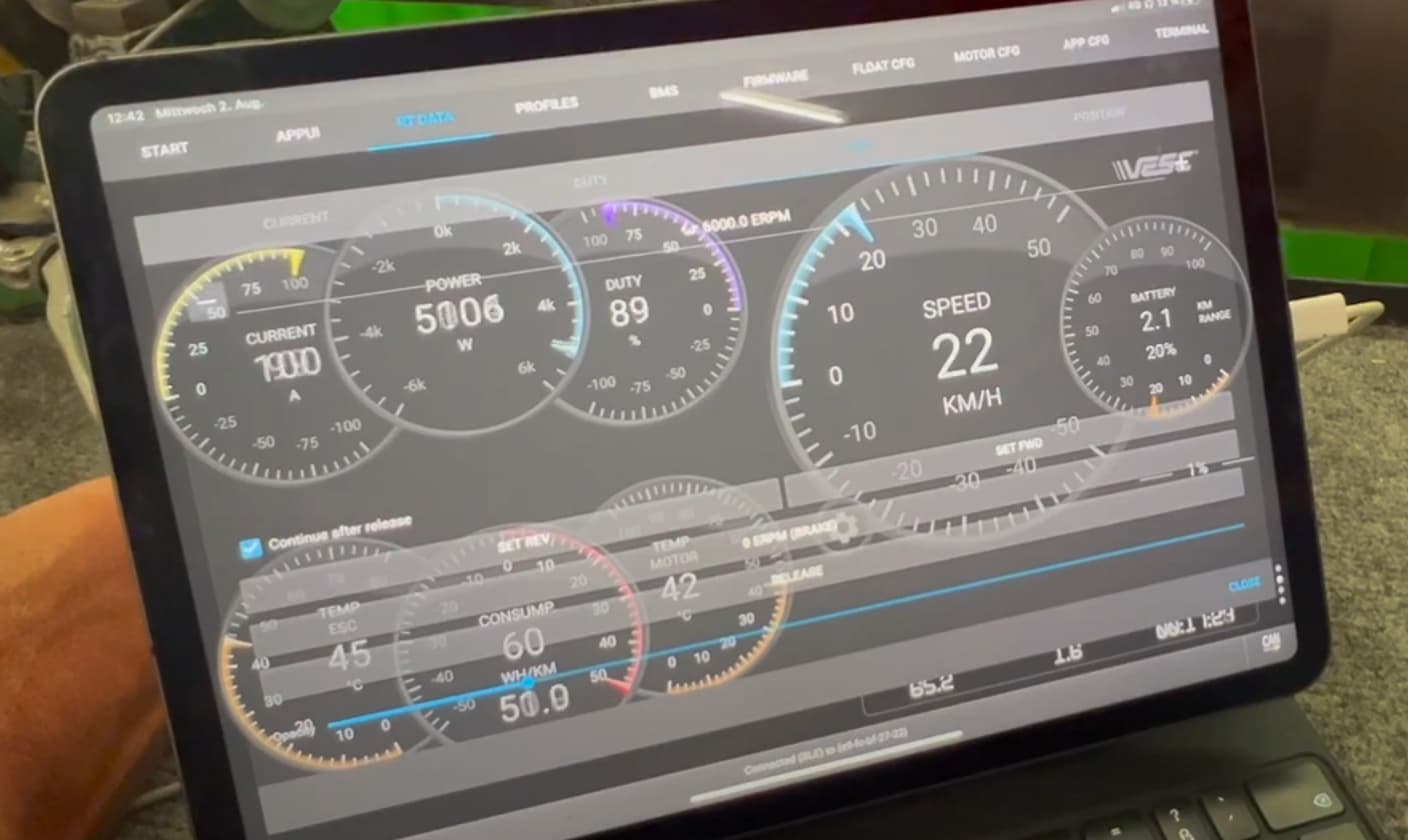
This is from this video (URL with timestamp): https://youtu.be/IvmQil68H-g?t=529
Battery current = Phase current * Duty Cycle - so 100A * 90% = 90A even though max battery amps were set to 70A
Remember: the BMS is designed to cut power at 80A (after 1 full second of continuous 80A current)
#5 Heat buildup with very high phase currents
Even if 80A were proven to be safe in the VESC firmware, thermals would be a problem.
The controller assembly, the phase wires, and the motor connector aren’t really designed to handle this level of continuous currents - so they would heat up very very quickly. Keep that in mind as well if you’re insisting on pushing the limits