Some of the pre configured voltage settings on the built-in BMS could cause the the board to power off while braking near full charge. To help prevent this the cell high protect values need to be slightly increased. We will use the high voltage tilt back setting in the controller config as our warning to stop vs the board just turning off. We will also set some amp limits within the controller settings to prevent overdrawing the BMS.
Open the VESCTool and set the following:
APP CFG > Balance > Tiltback > High Voltage Tiltback: Set the “High Voltage” value to 85v (4.25V per cell), the “Angle” to 5…8 deg, and the “Speed” to 1.0/s - you don’t want fast tiltback on downhills or while braking!!!.Also the angle should be high enough to be noticeable but not crazy high - again, keep thinking of those downhills
APP CFG > Balance > Tiltback > Low Voltage Tiltback: Set the “Low Voltage” value to 60v (3.0V per cell), the “Angle” to 10 deg, and the “Speed” to 2.0/s (also, keep it fairly slow).
MOTOR CFG > General > Current > Battery: Set “Battery Current Max” to 35 A, and “Battery Current Max Regen” to -35 A.
MOTOR CFG > General > Voltage: Set “Battery Voltage cutoff Start” to 54 V, and “Battery Voltage Cutoff End” to 50 V.
Next we need to configure the BMS.
Plug your board into the charger to make the BMS discoverable.
Use the Smart BMS app to connect to the BMS over Bluetooth.
Go to Parameter Settings in the bottom right.
Change cell volt high protect to 4.35v and press Set.
Enter 123456 for the password when prompted.
Next change sum volt high protect to 87v and press Set.
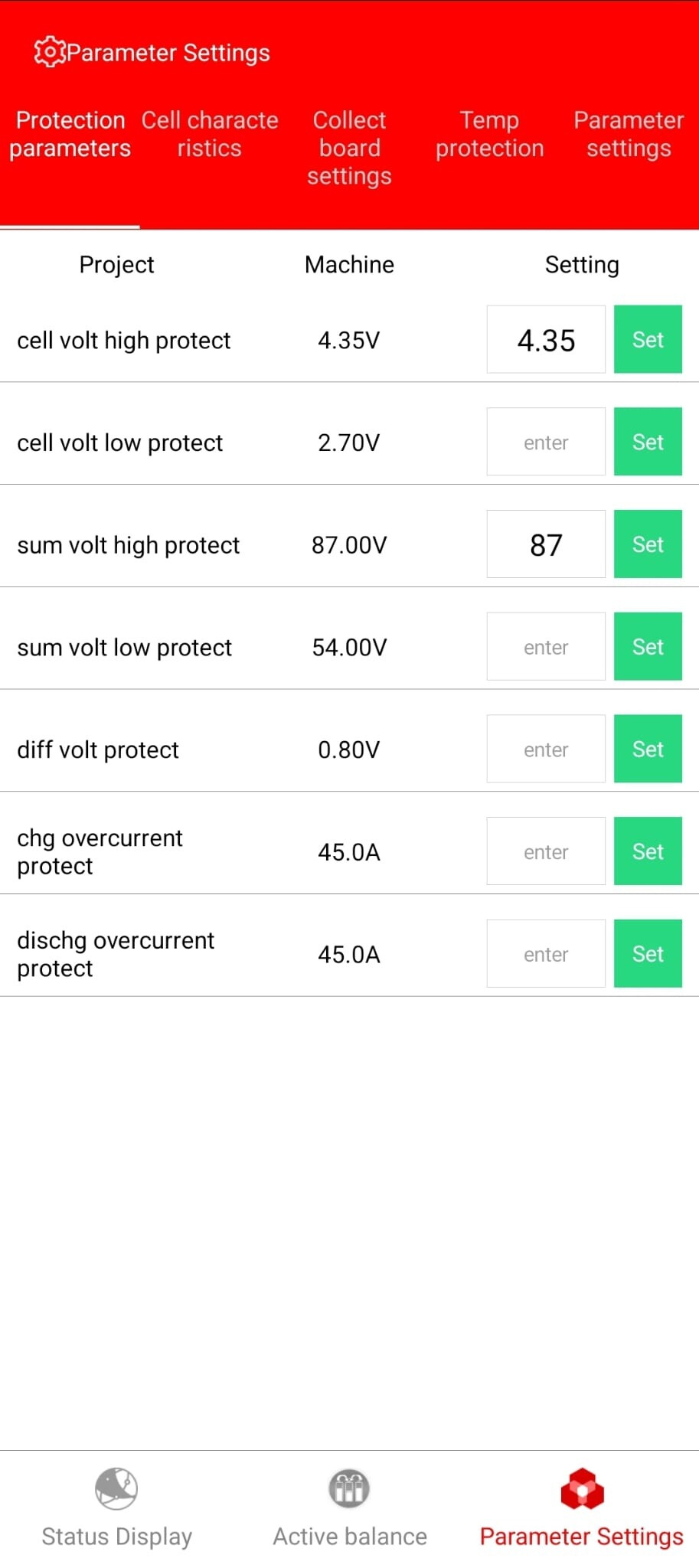
No other changes are needed in the Smart BMS app.
*Do not enable the balancing switch in the Smart BMS app. The pack will balance as needed with the existing configuration.