My first attempt to contributing - it started by trying to figure out my Amps to Accel/Decel Ratios from a log in Python, but then I realized there’s a distinct relationship between the Torque Offset needed and Speed:
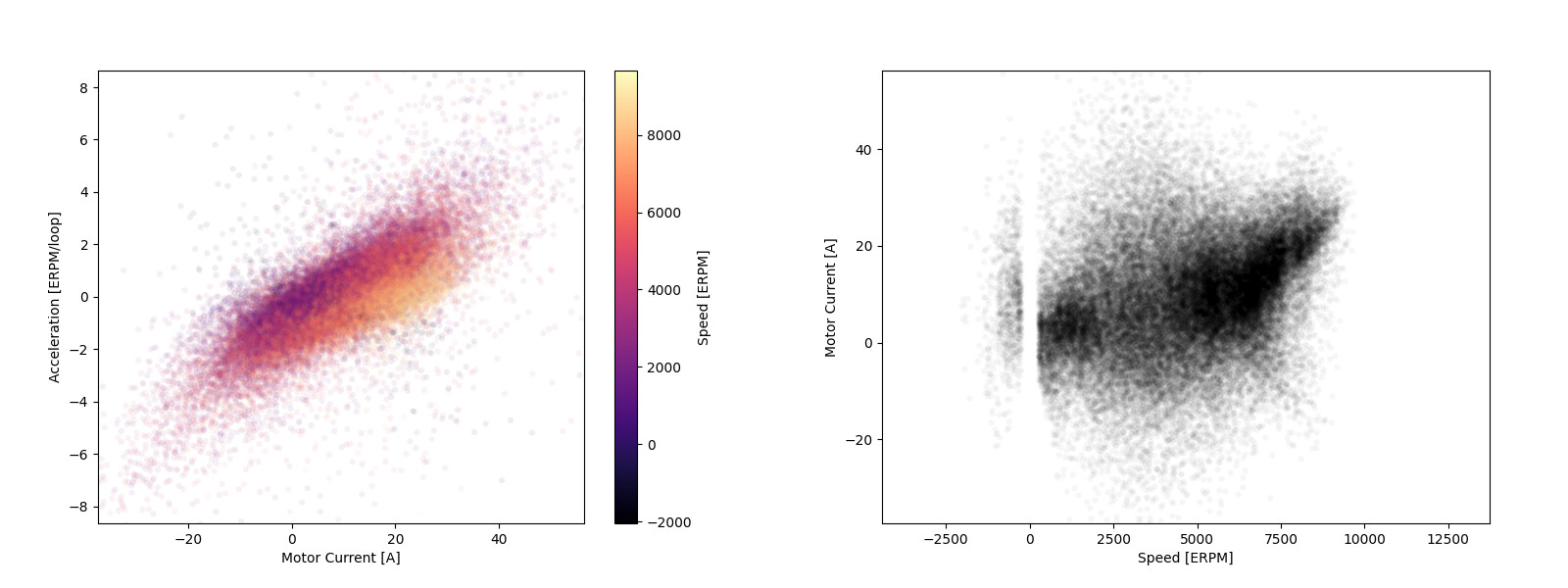
Which kind of makes sense, average torque at standstill is 0 and at speed you’re pulling more Amps. I used linear regression to find coefficients for atr_filtered_current and erpm. Intercept was relatively small, so I constrained it to 0. Essentialy, instead of multiplying by SIGN(d->erpm), we can use d->erpm itself:
float torque_adjusted = d->atr_filtered_current - 0.00022 * d->erpm * accel_factor;
expected_acc = torque_adjusted / accel_factor;
I’m assuming heavier riders need bigger Torque Offset, so that’s where the top accel_factor comes from. It can be rearranged a bit, but by storing the torque_adjusted first, it can be used as input in the Classic Torque Tilt as well (no need to raise nose at fast speeds).
The value of roughly 0.00022 is what I got from the regression, but since accel_factor is taken into account, I’m hoping it should be more or less the same for all riders if they tune that.
This is where the fun begins!
By some miracle (Im0rtality’s vesc_toolchain) I’ve been able to test it and to my surprise it worked! Less over-reacting, bonks and drops felt really good, and overall it was mostly a pleasant experience.
There was however one weird moment, where on a messed up sidewalk it sort of jerked. I think. (probably wheel locked for a moment > different ERPM > different Torque Offset > different setpoint?). I’m guessing it might need to rely more strongly on some filtering or accurate wheelslip detection in some edge cases.
Still though, pretty excited. But I know placebo is a thing, would anyone be willing to try it at their own risk? Here’s a pre-compiled .vescpkg:
Or if anyone could send me some representative VESC Tool ride logs for analysis, that would be much appreciated as well. And please tell me if it’s a completely wrong and flawed approach! What do you think?