O B S O L E T E - USE V6.0 + FLOAT PACKAGE INSTEAD
ATR Firmware
1) What is it
ATR stands for adaptive torque response, it replaces torque tiltback as you’d find it in 5.3 stable or 5.3 stable+ like v4/v6/etc on github. The basic idea is that instead of just looking at amps to determine whether the setpoint needs to be adjusted, ATR compares expected acceleration to actual acceleration.
If the board accelerates slower than expected (e.g. uphill or deep grass) then we raise the nose.
If the board accelerates faster than expected (e.g. downhill) then we lift the tail.
Also, this firmware includes all the other advanced features I’ve developed, including dark ride and many others, see the google sheet linked below for all details.
2)Requirements
#1 Requirement is a working board with stable 5.3 v6 firmware!!!
#2 Is your board having some isses and you’re hoping ATR will fix them??? You will be disappointed!
This only works with custom firmware, it’s not part of 5.3 stable. Here’s the firmware files for all 5.3 hardware, including Ubox 100V and VESC 6_75
ATR v24 ZIP File - Only use on working boards
IMPORTANT: ATR sucks balls if you try it with your existing app configs, so read on...
3) How to load
*The usual firmware loading procedure: Backup your config before loading firmware, select custom file, and DO NOT load the wrong firmware, LFOC v3.1 isn't the same as LFOC v3.0!!!*PLEASE LOAD FROM PC ONLY!
Note: Windows Bluetooth will not work with VESCs, so you connect via your phone and create a TCP Bridge (checkbox on bottom of first page in app) - note the IP address of the phone (must be on same wifi as PC!!) - then in the PC choose TCP connection
4) How to configure
When loading ATR firmware for the first time, make sure you load my XML file after restoring your own settings:ATR v23 ALL VESCs.xml (2.8 KB)
- you don’t really need this when just upgrading from ATRv18 or ATRv20, but see the release notes *
This file is hand-edited and safe to load, it won’t overwrite any of your personal settings like IMU calibration or fault/tiltback settings. For LFOCv3.1 users: please change your balance frequency to 833Hz for optimal behavior.
Configuration is done using the existing torque tiltback settings plus yaw_ki in the Multi ESC section. And it also uses the biquad filter values on the Tune page.
For all details see the table in this google sheet:
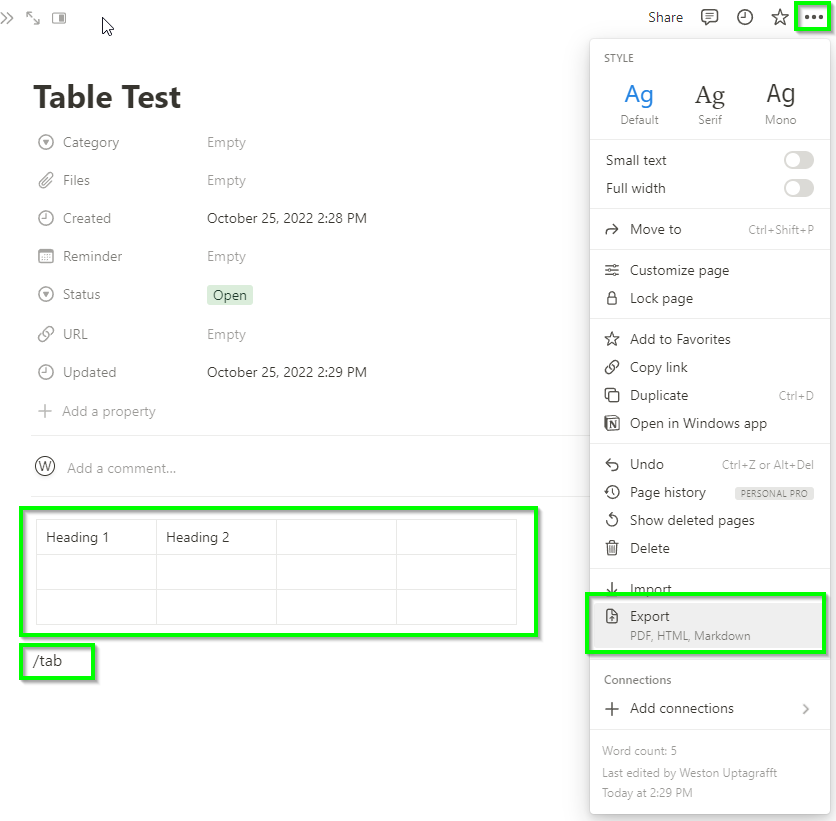
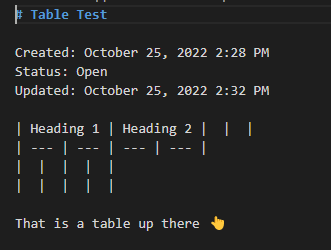
Would love to have this table right here, but how do I create a table without going full HTML?
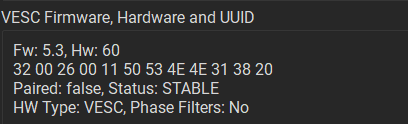
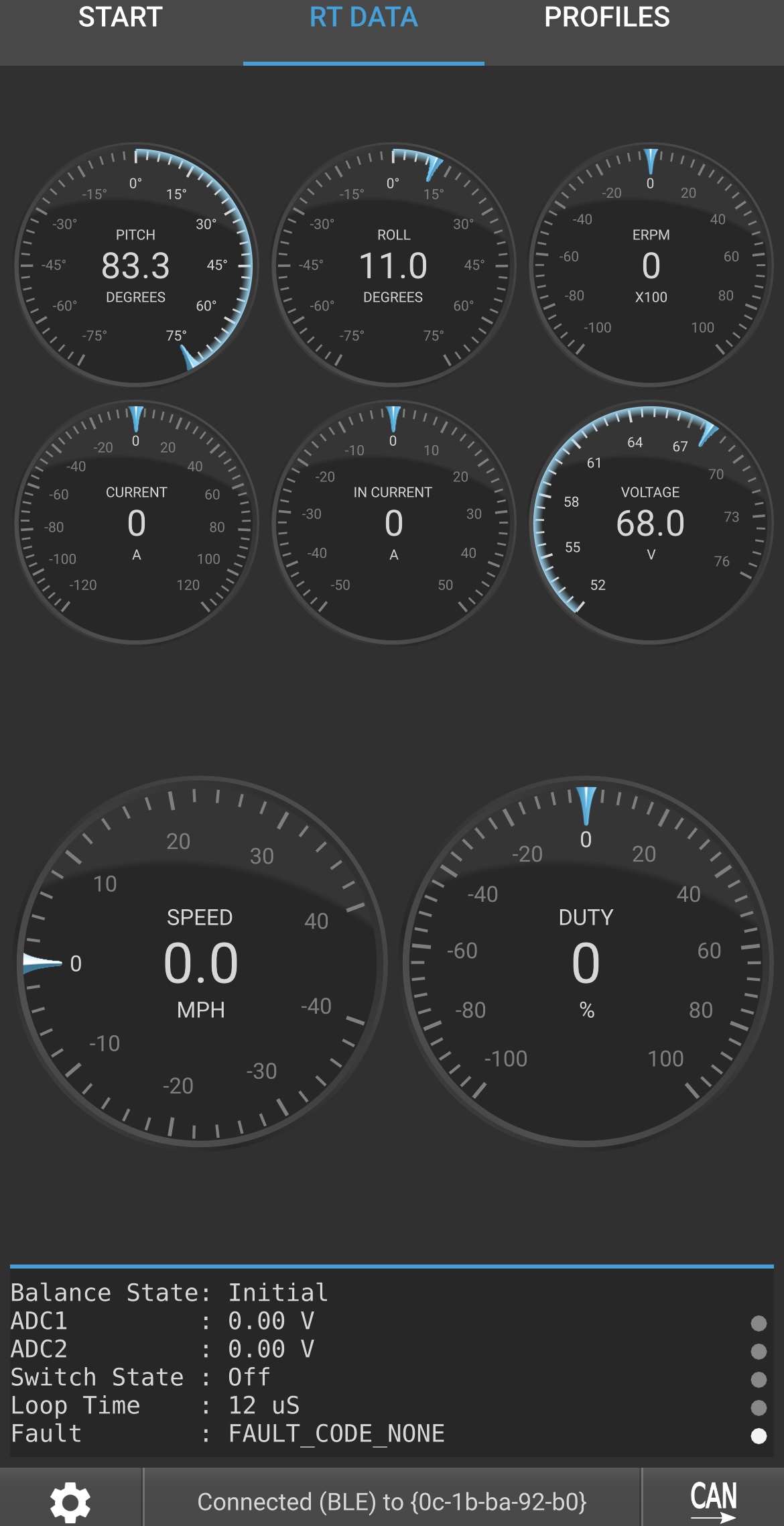
How to test whether the firmware download was successful? The revision number (currently 20) is being reported in the RT data screen (the last one) instead of “Loop Time” when first starting up (it switches to actual loop time after you first engage the board)
I recommend to stop right here, try my ATR xml file first. Once it's all working smoothly you can consider moving to Max's settings
5) Release Notes
v25 - FUTURE- FUTURE: Biquad filtering of Angular Rate P to prevent vibrations, allow much higher Rate P (aka YawP) on all IMUs - I’m currently testing this on my boards but it’s still not working as desired…
v24 - 6-Nov-2022
- Experimental: Braketilt is now actually enabled, so pt1 low/high now do have the described effect
- Experimental: ATR response boost for faster reaction, better handling of transitions - this is a feature I’ve been meaning to add back in for a while now, sometimes after a downhill the negative ATR can be detrimental to our ability to get up a steep climb if there’s not enough flat section between down and up, FM onewheels would perform way better in those situations - this should be fixed now
- Allow dirty landings for tricks (extra 10 degree pitch margin for 1 second) - off by default (if you do a big trick where your feet come off the sensor and the board disengages - then this feature allows you to re-engage with an extra 10 degree margin) - but: dirty landings not permitted in dark ride mode, thanks Max!
- Quickstop enabled with POSI too
Known issues:
- Battery percentage is back to the old behavior, very much affected by voltage sag so it’s only useful when stationary
- Caution: I’ve not tested the ATR response boost features with excessively low Amp/Accel ratios (YawD) - it might not work too well, in fact I’m pretty sure it will further amplify the flaws of configuring a low amp/accel ratio
v23 - 27-Oct-2022
- Mitch’s magic IMU fix is now permanent and not changeable
- Avoid taildrags after big bonks, jumps, drops - turn on via yaw_clamp=1
- Braketilt (experimental/wip feature) - configure via pt1 lo/hi - SORRY, PURE PLACEBO, IT’S ALWAYS OFF IN ATR23

- Click on start (to better notice that the board has engaged) - configurable, off by default
- YawP / Angular Rate P behavior now mimics stable/v6 behavior
<> - Known Issue: battery percentage takes a long time to initialize
- Known Issue: dirty landing feature cannot be enabled
- Known Issue: braketilt cannot be turned on
v20 - 10-Oct-2022:
-
Mitch’s magic IMU fix (set PT1 lowpass to 2Hz!)
-
PID “D” component has been eliminated, aka D value is ignored
-
Bugfix for an issue causing a harsh click on startup e.g. after a wheelslip dismount
-
UBox 100V support
-
Known Issue: big bonks can cause taildrag landings, so be careful!
-
Known Issue #2: battery percentage takes a long time to initialize
v18 - 20-Sep-2022:
- CAN Bus support has been re-enabled
- CAN based BMS current limiting is disabled
v17 - 6-Sep-2022:
- More stable battery percentage
- SimpleStart feature (think Badgersense SureStart), permanently enabled atm
v16 - 26-Aug-2022:
- Disable ATR (revert to plain torque tilt) by setting TT-Filer to 0Hz
- Improved hardware filtering for LFOCv3.1 (LSM6DS3 TR-C IMU)